Dcs can not only complete the functions of the original analog instrument, but also greatly exceeds the analog instrument. This is because it uses advanced computer technology, communication technology, CRT technology and control technology and other 4C technology. After digital control, the algorithm pre-stored in the controller in the controller can be said to be infinite, each algorithm represents one Kind of function. These functions are implemented in analog meters using analog lines. They are limited by analog line drift, resistors, capacitors, etc. It is very costly or even impossible to make a high-precision analog meter. The digitally controlled algorithm is implemented in a program. Use programs to replace the functions that analog lines can achieve. In theory, it is infinite, and this is a great progress. The principle is the same for all DCS systems. The various algorithms are often referred to as function blocks. The assembly of function blocks is called a function block library. The PV function block with PV-SP is a proportional-integral-derivative operation that realizes the difference between the process variable (PV) and the set value (SP). Its parameters are set, process variable, and proportional-integral-derivative coefficients. Its output is usually sent to the address of the terminal board of the output board. Finally, the output is sent to the valve. In general, the PV function block includes PV-SP operations. Some PID function blocks do not have SP and PV subtraction, which is to add other operations before the PID. Such as adding dead zone. Another important function block in the function block library is the station function block. It cannot express the direct relationship between input and output by mathematical formula. It is a function block for realizing human-computer communication, and sends the set value determined by the person to the control loop. And the conditions for when the control loop is connected and the conditions for realizing the hand/automatic switching.
HD Slip Ring is an electromechanical device. It allows the transmission of power and signals from a stationary to a rotating structure. It consists of an electrically conductive rotating ring, with one or more stationary contacts. They are called "stations" or "spokes". Electrical signals (power and/or data) are transmitted through the slip ring. This is done by means of brushes that make contact with the ring.
It is typically used where there is a need to rotate one object relative to another. Especially for passing power and/or signals from the stationary object to the rotating object.
Regarding it's application in conjunction with other equipment, we'll need high-quality production. Oubaibo uses components imported from the United States and high-frequency signal processing. Which has the characteristics of small size, lightweight, good insulation performance, stable transmission, and so on. Its unique design makes it an ideal choice for many applications.
Hd Slip Ring,Slip Ring Power,Fiber Optic Slip Rings,Small Slip Rings Dongguan Oubaibo Technology Co., Ltd. , https://www.sliproubos.com
The DCS controller is mainly composed of a CPU, a ROM, a RAM, an E2PROM, an address setting switch, and the like. The CPU completes the operation, and the ROM is used to store the operating system and the function block library. The arrangement of the function blocks in the ROM is determined, and the user cannot change. RAM is used to store CPU operation results and I/O signals. E2PROM saves the control block of the function block. When the power is off, the control scheme will not be lost. Not only that, but the control scheme is not suitable and can be modified. Modify the UV radiation to erase the contents of the E2PROM. The controller should have an address in the network that is set by these address switches. The DCS of the function block arranged in the ROM refers to this arrangement as a function code. The order of the codes is the address of the function block in the library. The DCS of various manufacturers have some differences in the processing of arithmetic algorithms, so the names are different. If some DCS refers to these algorithms as internal instruments, but the essence is a program, the essence is the same. When using these function blocks, the relationship between the input and output of the function block should be indicated, as well as many parameters required for the operation. When the user determines the control strategy to form the control scheme according to the controlled object, select the function block required for the control in the function block library, clarify the connection relationship between the function blocks, and first define its address in the E2PROM. The connection with other function blocks is also represented by an address. Fill in the required parameters at the same time. This work is called configuration, which is to distinguish it from programming in language. When configured, it can be used as a way of drawing, ie CAD mode. CAD has a software that draws the functional blocks required for each control loop and the connections between them. It is called an engineering station. Use it to configure the controller. When configuring, first draw a SAMA map or an ISA map. When using a small function block, draw a ISA map when drawing a SAMA diagram or a large function block.
The most important function block in the function block library is the PID function block. Its relationship between the output Y(t) and the input X(t) is a proportional-integral-derivative relationship, that is, it plays an extremely important role in process control. The PID function block must be used when completing the closed loop control. The block diagram of a control loop and cascade control loop of closed-loop control is shown in Figure 1 and Figure 2. Figure 3 and Figure 4 are the configuration diagram of Infi90. 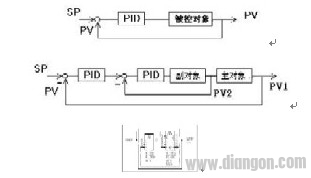
Some DCS PID function blocks are almost all-inclusive and have more than 100 parameters. 1, first ask PV from where to fill in the PV address; PV value from an analog input module or terminal board; 2, SP address, SP address is usually the address of the station; 3, there is no dead zone, There is no dead zone, this item will not be in charge, there is a dead zone, to write the width and height of the dead zone; 4, whether to integrate, to integrate, what is the integral constant, 5, whether to differentiate, to differentiate, differential What is the constant; 6, what is the ratio; 7, do not want dead zone, if you want, you need to enter the dead zone width, the height of the dead zone. 8. Do you want Smith's estimation? If you want, you need to fill in the parameters of the Smith predictor; 9. The output of the PID function block is there, such as the function block that is input to the analog output module or terminal board. Its output is really to the valve. The output can also be in memory, but an address is specified. At this time, the output of the PID function block becomes the input of another block of function. For cascade control, the output of the first PID is the second PID setting. At this time, there are two PVs, and two station function blocks are also used, but only one station function block has a hand/self-switching relationship. The operator station and the operator station communicate directly with the function block, and the priority hand station is higher than the operation station.
It is essential to add, subtract, multiply, divide, square, and square the arithmetic operations. Followed by function operations, triangular geometry operations, matrix operations, C language interfaces and Basic language interface function blocks. Function blocks connected to the hardware, such as function blocks for reading analog and switch inputs, function blocks for analog and switch outputs, function blocks for reading analog and switch quantities from the network, and analog and digital functions for sending to the network Piece.
As a DCS controller, the necessary function blocks are: the function block connected to the hardware is usually 4 blocks, which is related to the type of the input board; including the analog input function block, the analog output function block, and the digital input function block. , digital output function block. Each function block must be connected to a specific terminal block. If there is a signal to receive the fieldbus, a function block for receiving the fieldbus signal is also required. There are also 4 functional blocks connected to the network. They are: analog network input, analog network output, switch network input, and switch network output. Followed by the PID function block, station function block, followed by arithmetic operations (add, subtract, multiply, divide). Then there are function operations (primary filtering, lead-lag, two-dimensional curves, etc.), trigonometric operations (sine, cosine, tangent, cotangent, etc.) and three-dimensional matrix operations. Some advanced operations, such as fuzzy logic, model control, etc., are more or less, but they are the criteria for judging the strength of DCS systems. As for some industry's controlled object functions, there must be some special hardware support, such as the SOE function of the power plant, and a hardware input board with a fast interrupt.
In order to increase the number of I/O points of the controller and increase the distance from the controller to the field, the field bus and the controller can be connected, such as the lonworks bus. At this time, there should be a function block when the lonworks is connected in the controller. The modules on the Lonworks bus have separate I/O boards and computing boards, and there are a small number of function blocks in the computing board.